
Tork Nedir?
 Tork, fizik ve mühendislikte temel bir kavramdır ve dönme hareketlerini anlamak için vazgeçilmezdir. Özellikle mekatronik alanında, motorlar, robotlar ve otomasyon sistemleri gibi dönme hareketine dayalı sistemlerin tasarımı ve kontrolünde torkun önemi büyüktür. Bu makalede, torkun ne olduğunu, nasıl hesaplandığını ve mekatronik sistemlerdeki uygulamalarını detaylı bir şekilde ele alacağız. Üniversite öğrencileri, mühendisler ve teknoloji meraklıları için hazırlanan bu içerik, teorik bilgilerin yanı sıra pratik örneklerle zenginleştirilmiştir.
Tork, fizik ve mühendislikte temel bir kavramdır ve dönme hareketlerini anlamak için vazgeçilmezdir. Özellikle mekatronik alanında, motorlar, robotlar ve otomasyon sistemleri gibi dönme hareketine dayalı sistemlerin tasarımı ve kontrolünde torkun önemi büyüktür. Bu makalede, torkun ne olduğunu, nasıl hesaplandığını ve mekatronik sistemlerdeki uygulamalarını detaylı bir şekilde ele alacağız. Üniversite öğrencileri, mühendisler ve teknoloji meraklıları için hazırlanan bu içerik, teorik bilgilerin yanı sıra pratik örneklerle zenginleştirilmiştir.
Tork, bir nesnenin dönme eğilimini ölçen bir büyüklüktür ve günlük hayattan endüstriyel uygulamalara kadar geniş bir yelpazede karşımıza çıkar. Bir vidayı sıkmak, bir kapıyı açmak veya bir aracın hızlanmasını sağlamak gibi pek çok işlemde torkun rolü vardır. Mekatronik sistemlerde ise tork, motorların performansını, robotların hareket kabiliyetini ve kontrol sistemlerinin hassasiyetini doğrudan etkiler.
Bu makale, torkun temel tanımından başlayarak, hesaplama yöntemlerine, yönüne ve mekatronik uygulamalarına kadar geniş bir perspektif sunmayı hedefliyor. Ayrıca, torkun fizikle olan ilişkisini ve pratik örneklerle desteklenmiş açıklamaları içererek, okuyucuların konuyu derinlemesine anlamasını sağlamayı amaçlıyor.
1. Tork Nedir? Tanım ve Birimleri
1.1 Torkun Tanımı
Tork, bir nesnenin bir eksen etrafında dönme eğilimini ifade eden bir büyüklüktür. Diğer bir deyişle, bir kuvvetin bir nokta veya eksen etrafında döndürme etkisidir. Tork, hem fizik hem de mühendislikte sıkça kullanılan bir kavramdır ve dönme hareketlerinin analizinde kritik bir rol oynar. Örneğin, bir bisiklet pedalını çevirirken veya bir somunu sıkarken uygulanan güç, tork olarak tanımlanır.
1.2 Torkun Birimleri
Tork, Uluslararası Birimler Sistemi’nde (SI) Newton-metre (Nm) olarak ölçülür. Bu birim, bir kuvvetin (Newton) bir mesafe (metre) üzerinde uyguladığı etkiyi temsil eder. Bazı bağlamlarda, özellikle İngiliz birim sisteminde, foot-pound (ft-lb) gibi farklı birimler de kullanılabilir. Ancak SI sistemi, bilimsel ve mühendislik çalışmalarında daha yaygındır.
1.3 Kuvvet ve Tork Arasındaki Fark
Tork ve kuvvet, sıkça karıştırılan kavramlardır. Aralarındaki farkları şu şekilde özetleyebiliriz:
Kuvvet: Bir nesneye uygulanan doğrusal bir etkidir (örneğin, itme veya çekme).
Tork: Kuvvetin bir eksen etrafında döndürme etkisidir. Aynı kuvvet, farklı bir noktadan uygulandığında farklı tork değerleri üretebilir.
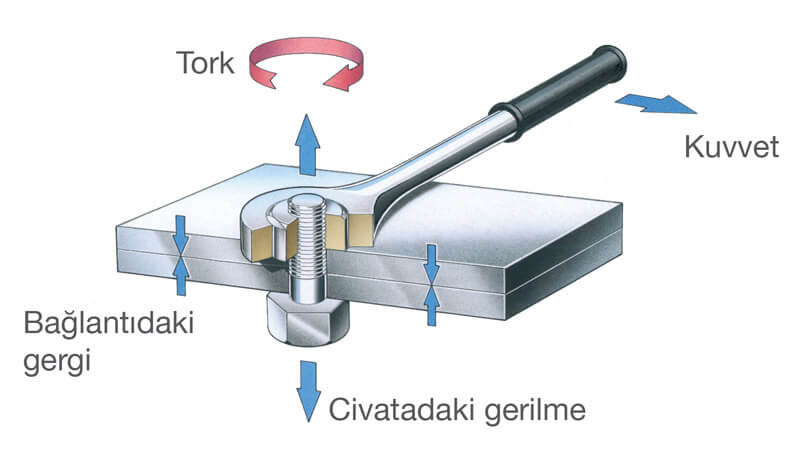
Örneğin, bir kapıyı açmak için uygulanan kuvvet, kapı koluna ne kadar uzakta uygulanırsa, o kadar büyük bir tork oluşturur. Bu, torkun hem kuvvet hem de kuvvetin uygulandığı noktanın mesafesine bağlı olduğunu gösterir.
Kavram | Tanım | Birim | Örnek |
|---|---|---|---|
Kuvvet | Doğrusal hareket sağlar | Newton (N) | Bir arabayı itmek |
Tork | Dönme hareketi sağlar | Newton-metre (Nm) | Bir vidayı sıkmak |
2. Torkun Hesaplanması
2.1 Tork Formülü
Tork, şu formülle hesaplanır:
τ = r * F * sin(theta)
τ (tork): Hesaplanacak tork değeri (Nm)
r: Kuvvetin uygulandığı noktanın eksen mesafesi (m)
F: Uygulanan kuvvet (N)
θ: Kuvvet vektörü ile kaldıraç kolu arasındaki açı (rad)
Bu formülde, kuvvetin yönü ve uygulandığı noktanın konumu, sonuçlanan tork değerini doğrudan etkiler. Örneğin, bir anahtarı kullanarak bir vidayı sıkmak için uygulanan kuvvet, anahtarın ucuna ne kadar uzakta uygulanırsa, o kadar büyük bir tork oluşturur.
2.2 Örnek Uygulama
Bir anahtarın ucuna 0.5 m uzaklıkta 20 N kuvvet uygulandığını ve bu kuvvetin anahtarın dönüş yönüyle aynı doğrultuda olduğunu varsayalım (θ = 90°, sin(90°) = 1). Bu durumda tork şu şekilde hesaplanır:
tau = 0.5 * 20 * sin(90°) = 0.5 * 20 * 1 = 10 Nm
Bu örnek, torkun hem kuvvet hem de mesafe ile nasıl ilişkili olduğunu gösterir. Eğer aynı kuvvet, anahtarın daha kısa bir noktasına (örneğin, 0.2 m) uygulanırsa, tork yalnızca 4 Nm olacaktır.
2.3 Tork Hesaplamasında Dikkat Edilmesi Gerekenler
Açı (θ): Kuvvetin etkili olabilmesi için doğru açıyla uygulanması gerekir. En yüksek tork, θ = 90° olduğunda elde edilir.
Kaldıraç Kolu (r): Kuvvetin eksenden uzaklığı arttıkça tork büyür.
Kuvvetin Yönü: Kuvvetin yönü, torkun yönünü de belirler.
3. Torkun Yönü ve Vektör Özelliği
Tork, sadece büyüklüğü değil, yönü olan bir vektör büyüklüğüdür. Yönü, dönme hareketinin gerçekleştiği düzlemin dik doğrultusunda belirlenir. Yönü belirlemek için sağ el kuralı kullanılır:
Sağ elinizi dönme yönünde sıkın.
İşaret parmağınız, tork vektörünün yönünü gösterir.
Bu özellik, özellikle birden fazla torkun bir arada çalıştığı sistemlerde (örneğin, bir robotun eklemlerinde) net torku hesaplamak için önemlidir. Torkların yönleri, sistemdeki dönme hareketlerini doğru şekilde analiz etmek için dikkate alınmalıdır.
Örneğin, bir robot kolunda birden fazla motor aynı anda tork üretiyorsa, her bir torkun yönü ve büyüklüğü, kolun net hareketini belirler. Bu, mekatronik sistemlerde hassas kontrol için kritik bir bilgidir.
4. Tork Mekatronikte
Mekatronik, mekanik, elektronik ve bilgisayar mühendisliğini bir araya getiren bir disiplindir. Bu alan, dönme hareketlerine dayalı sistemlerin tasarımı ve kontrolünde tork kavramının kritik öneme sahip olduğu birçok uygulamayı içerir.
4.1 Elektrikli Motorlarda Tork
Elektrikli motorlar, mekatronik sistemlerin temel bileşenleridir. Motorların performansı, ürettikleri torkla doğrudan ilişkilidir. Örneğin:
DC Motorlar: Sabit manyetik alan ve döner bobin arasındaki etkileşimle tork üretir.
AC Motorlar: Alternatif akımın oluşturduğu manyetik alanlarla çalışır ve genellikle daha yüksek tork değerleri sağlar.
Motorların torku, hız ve yük kapasitesini belirler. Örneğin, bir robot kolunun ağır nesneleri kaldırabilmesi için yeterli torka sahip motorlar kullanılmalıdır.
4.2 Robotik Sistemlerde Tork
Robotik sistemlerde, her eklem için gereken tork, robotun hareket kabiliyetini ve taşıyabileceği yükü belirler. Örneğin:
Bir endüstriyel robotun parçaları taşıması için eklem motorlarının yeterli torka sahip olması gerekir.
İnsansı robotlar (humanoid robotlar) için ise her eklemde insan benzeri hareketleri sağlayacak tork değerleri kritiktir.
Tork sensörleri, robotların hareketlerini gerçek zamanlı olarak izlemek ve kontrol etmek için kullanılır. Bu sayede, robotlar güvenli ve verimli bir şekilde çalışabilir.
4.3 Kontrol Sistemlerinde Tork
Mekatronik sistemlerde, tork sadece üretilmesi değil, aynı zamanda kontrol edilmesi gereken bir büyüklüktür. Örneğin:
Servo Motorlar: Belirli bir açıya veya hıza ulaşmak için torku hassas bir şekilde kontrol eder.
PID Kontrolörler: Tork değerlerini gerçek zamanlı olarak ayarlayarak sistemlerin istikrarını sağlar.
Bu kontroller, sensörler ve geri bildirim mekanizmaları kullanılarak gerçekleştirilir. Örneğin, bir CNC tezgahında tork sensörleri, kesme işleminin hassasiyetini artırmak için kullanılır.
5. Pratik Örnekler ve Uygulamalar
5.1 Otomotiv Mühendisliğinde Tork
Otomotiv sektöründe, motorların ürettiği tork, aracın hızlanma performansını ve çekiş gücünü belirler. Örneğin:
Dizel Motorlar: Düşük devirlerde yüksek tork sağlar, bu da ağır yüklerin çekilmesinde avantaj sağlar.
Benzinli Motorlar: Genellikle daha yüksek devirlerde maksimum torka ulaşır.
Ayrıca, araçların performansını artırmak için chiptuning gibi yöntemlerle motor yazılımı üzerinde değişiklikler yapılabilir. Bu işlemler, motorun tork değerlerini optimize ederek hızlanma ve çekiş performansını iyileştirir.
5.2 Endüstriyel Makinelerde Tork
Endüstriyel makinelerde, tork dişliler, kayışlar ve miller aracılığıyla iletilir. Örneğin:
CNC Tezgahları: Kesme işlemlerinde gereken tork, motorların seçiminde ve işlem hızlarının belirlenmesinde kritiktir.
Konveyör Sistemleri: Malzemeleri taşımak için yeterli torka sahip motorlar kullanılmalıdır.
Tork kontrol cihazları, bu tür sistemlerde güvenilirlik ve verimlilik sağlar.
5.3 Günlük Hayattaki Örnekler
Tork, sadece endüstriyel uygulamalarda değil, günlük hayatta da karşımıza çıkar:
Vida Sıkmak: Bir matkap veya anahtar kullanarak vidayı sıkmak için uygulanan kuvvet, tork oluşturur.
Kapı Açmak: Kapı koluna uygulanan kuvvet, kapının dönmesini sağlayan torku yaratır.
Bisiklet Sürmek: Pedallara uygulanan kuvvet, tekerleklerin dönmesini sağlayan torku üretir.
6. Tork ve İlgili Fizik Kavramları
6.1 Tork ve Açısal İvme
Tork, açısal ivme ile doğrudan ilişkilidir. Formül şu şekildedir:
tau = I * alpha
I: Eylemsizlik momenti (kg·m²)
α: Açısal ivme (rad/s²)
Bu ilişki, bir nesnenin dönme hızının nasıl değiştiğini anlamak için kullanılır. Örneğin, bir motorun torku, bağlı olduğu yükün dönme hızını artırmak için kullanılır.
6.2 Tork ve İş
Tork tarafından yapılan iş, şu formülle ifade edilir:
W = tau * theta
W: Yapılan iş (J)
θ: Dönme açısı (rad)
Bu, doğrusal kuvvetlerin yaptığı işe benzer ancak dönme hareketine özgüdür.
6.3 Denge Durumu
Bir sistem, net tork sıfır olduğunda dönme dengesi sağlar. Bu, hem statik (durağan) hem de dinamik (hareket halinde) sistemler için geçerlidir. Örneğin, bir köprünün tasarımında, tüm torkların dengede olması, yapının sabit kalmasını sağlar.
Sonuç
Tork, fizik ve mühendislikte vazgeçilmez bir kavramdır. Mekatronik (sistemlerde, motorların performansından robotların hareket kabiliyetine, kontrol sistemlerinin hassasiyetinden endüstriyel makinelerin verimliliğine kadar pek çok alanda torkun rolü büyüktür. Bu makale, torkun temel tanımından başlayarak, hesaplama yöntemlerine, yönüne ve mekatronik uygulamalarına kadar geniş bir perspektif sundu.
Üniversite öğrencileri, mühendisler ve teknoloji meraklıları için bu konu, hem teorik hem de pratik açıdan zengin bir kaynak sunar. Torkun mekatronik sistemlerdeki önemini daha iyi anlamak için, bu makaledeki örnekleri kendi projelerinizde uygulayabilirsiniz. Siz de mekatronik projelerinizde torkla ilgili deneyimlerinizi paylaşmak veya sorular sormak istiyorsanız, yorum bölümünden bize ulaşabilirsiniz. Ayrıca, mekatronik alanındaki diğer ilginç konuları da takip etmek için Mekatronik.net sitemizi ziyaret etmeyi unutmayın!